KURZ: Export programu do robotické stavebnice
- Podrobnosti
- Mgr. Jan Baťko
- Aktualizováno: 01.09.2017
- Zobrazení: 7926
Hotový program se do řídící jednotky NXT exportuje pomocí kabelu přes rozhraní USB. U novější jednotky EV3 máme k dispozici ještě Bluetooth a Wi-Fi připojení. Před exportem je nutné mít v řídící jednotce nahraný aktuální firmware pro dané programovací prostředí. Postup nahrání firmware je vysvětlený v kapitole nazvané Aktualizace firmware.
Provedení v programovacím prostředí
NXT-G
Možnosti exportu
Export přes ovládací panel
Export programu do řídící jednotky robotické stavebnice lze v programovacím prostředí NXT-G provést pomocí nahrávacího panelu umístěného v pravém dolním rohu programovací plochy, který obsahuje celkem pět tlačítek.

Připojená zařízení
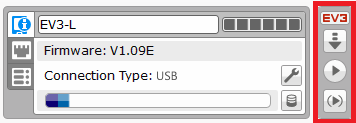
První tlačítko umístěné vlevo nahoře slouží k zobrazení připojených zařízení, úrovně nabytí baterie a hlavně ke správě pamětového prostoru řídící jednotky (blíže popsáno v kapitole Správa paměti robotické stavebnice).

Uložení programu do jednotky
Tlačítko vlevo dole umožňuje pouze stáhnout program do paměti řídící jednotky.
![]()
Nahrání celého programu do jednotky
Prostřední tlačítko slouží k nahrání celého programu do paměti a ihned po nahrání je program také spuštěn.
![]()
Nahrání vybrané části programu do jednotky
Pravé horní tlačítko reprezentuje funkci Download and run selected (Stáhnout a spustit vybrané). Umožňuje tedy nahrát do paměti řídící jednotky pouze vybranou část programu, kterou následně po nahrání okamžitě spustí. Tímto způsobem je možné zkoušet například správnou funkčnost jednotlivých programových bloků bez nutnosti nahrávat a pouštět celý program.

Zastavení prováděného programu
Pravé dolní tlačítko má funkci Stop. Po jeho stisknutí se vyšle příkaz k zastavení prováděného programu.
![]()
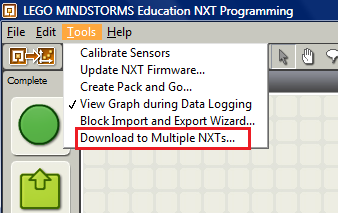
Hromadný export
V horním menu pod záložkou Tools nalezneme možnost Download to Multiple NXTs, která umožňuje export programu do několika zařízení najednou.
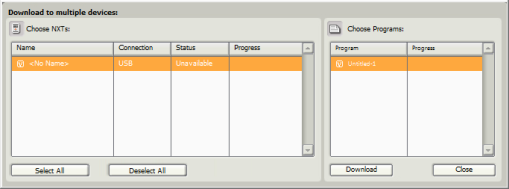
Po rozkliknutí se otevře nové dialogové okno, které je rozdělené na dvě části. Vlevo je možné vybrat jedno nebo více připojených zařízení. Vpravo se volí, který program je určen k nahrání do řídící jednotky. Po kliknutí na Download se provede nahrání. Tato funkce je využitelná v případě, že potřebujeme stejný program nahrát do více řídících jednotek. Nemusíme to tedy provádět jednotlivě, ale díky této možnosti se nahrání provede hromadně.
RobotC
Postup exportu
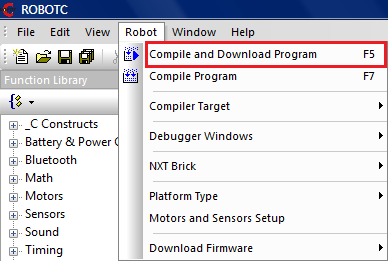
Pro export programu do řídící jednotky v programovacím prostředí RobotC máme dvě možnosti:
- vybrat v horním menu v záložce Robot možnost Compile and Download Program ,
- stisknout klávesu F5.
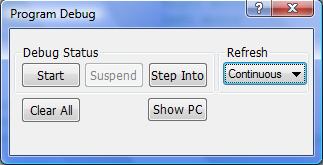
Po provedení jedné z těchto dvou možností je program zkompilován a nahrán do řídící jednotky a otevře se dialogové okno ve kterém je možné program ovládat (spouštět, zastavovat, spouštět pouze určité části).
EV3
Export programu do řídící jednotky EV3
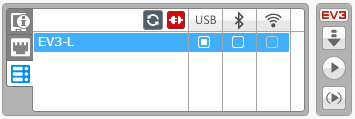
Před nahráním programu do paměti je nutné mít řídící jednotku EV3 připojenou k počítači. Provést to můžeme buďto přes rozhranní USB nebo prostřednictvím Bluetooth či Wi-Fi modulu. Změnu způsobu připojení můžeme softwarově provést v pravé spodní části programovacího prostředí EV3, kde se nachází nástroje pro ovládání připojené řídící jednotky. V třetí záložce nazvané Available Brics (dostupné řídící jednotky) se nám zobrazují všechny jednotky připojené k počítači, včetně způsobu připojení, který můžeme zakliknutím příslušné volby změnit.
Panel pro nahrání vytvořeného projektu do řídící jednotky se nachází v pravé dolní části programovacího prostředí a obsahuje tři tlačítka.
![]() Download - volba umožňující pouze nahrání vytvořeného projektu do paměti řídící jednotky.
Download - volba umožňující pouze nahrání vytvořeného projektu do paměti řídící jednotky.
![]() Download and Run - po kliknutí na tlačítko se projekt nahraje do řídící jednotky a zároveň se okamžitě spustí jeho vykonávání.
Download and Run - po kliknutí na tlačítko se projekt nahraje do řídící jednotky a zároveň se okamžitě spustí jeho vykonávání.
![]() Run Selected - po kliknutí se nahraje pouze označená část vytvářeného programu a okamžitě se začne provádět.
Run Selected - po kliknutí se nahraje pouze označená část vytvářeného programu a okamžitě se začne provádět.