KURZ: Deklarace motorů a senzorů
- Podrobnosti
- Mgr. Jan Baťko
- Aktualizováno: 30.03.2014
- Zobrazení: 6756
Při použití motorů a senzorů v programovacím prostředí RobotC je pro přehlednost a úplnost programu dobré provést jejich deklaraci. Její zápis je možné provést ručně v úvodu programu (popis deklarace senzorů je uveden v kapitolách týkajících se jednotlivých senzorů v sekcích Vstupní moduly a Rozšiřující vstupní moduly.
POPIS V PROGRAMOVACÍM PROSTŘEDÍ
RobotC
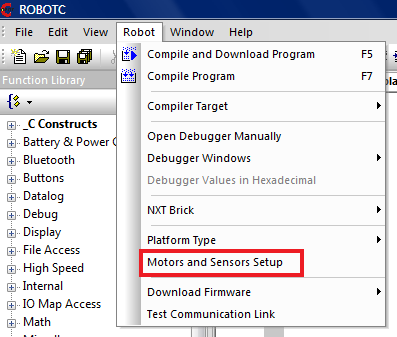
Volbu pro deklaraci a nastavení senzorů a motorů nalezneme v horní části menu v záložce Robot zvolením možnosti Motors and Sensors Setup.
Deklarace motorů
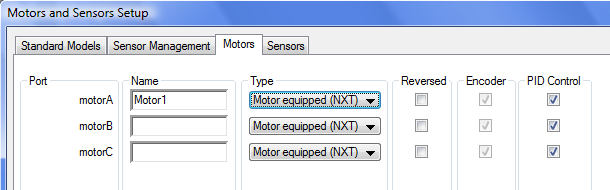
Po zvolení možnosti Motors and Sensors Setup se otevře nové dialogové okno, které obsahuje čtyři záložky. Zaměříme se na poslední dvě nazvané Motors a Sensors. Deklarace motorů se skládá z několika částí. V sekci Port můžeme vidět všechny tři výstupní porty (A, B a C). Podle toho, ke kterému výstupnímu portu je náš motor připojen si zvolíme příslušný řádek deklarace. V sekci Name zadává uživatel vlastní název motoru. U sekce Type je defaultně zvolen typ používaných motorů, tedy NXT. Následují tři možnosti pro zaškrnutí. V části Reversed vyjadřujeme, že chceme motor používat také jako reverzivní s možností dopředného i zpětného otáčení. Volba Encoder vyjadřuje využití čítače otáček pro řízení otáčení a PID Control zajišťuje řízení a synchronizaci motorů.
Deklarace senzorů
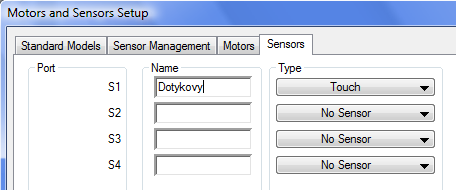
Deklarace senzorů se provádí v záložce Sensors. V levé sekci Port jsou zobrazeny všechny čtyři vstupní porty (S1 - S4). K příslušnému vstupnímu portu napíšeme volitelný název v sekci Name podle toho, ke kterému z portů je připojen. Následně si zvolíme druh senzoru ze seznamu v sekci Type.
Celou deklaraci poté aplikujeme kliknutím na tlačítko Použít a potvrdíme kliknutím na tlačítko OK.